![]()
![]()
Dana jest funkcja \(f : A \longrightarrow \r \). gdzie \(A \subset \rn \).
Należy wyznaczyć efektywnie minimum globalne, to znaczy punt \(a \in A\) taki, że
\[ \forall x \in A \ f(a) \le f(x). \]
lub jego możliwie najlepsze przybliżenie.
Oznaczamy zbiór rozwiązań:
\[ A^{\star } := \{a \in A: \hbox { dla kaÅijdego } x \in A \ \‚f(a) \le f(x)\}. \]
Szukanie maximum globalnego funkcji \(f \rwn \) szukanie minimum globalnego funkcji \(-f\).
Omówimy najprostszy algorytm stochastycznej optymalizacji, Pure Random Search (PRS).
Zakładamy, że \(f : A \to \r \) jest funkcją ciągłą, \(A\) jest zwarty. Dla uproszczenia załóżmy, że \(A = [0,1]^n\).
Algorytm PRS.
1. Losujemy punkt ze zbioru \(A\) zgodnie z rozkładem jednostajnym na \(A\). Oznaczamy go jako \(x_0\). Kolejne punkty \(x_1, x_2,x_3 \dots ,\) tworzymy w następujący sposób.
Dla \(t = 0,1,2,3,\dots \):
2. Losujemy punkt \(\by _t \in A\) według rozkładu jednostajnego.
3. Jeżeli \(f(\by _t) < f(x_t)\), kładziemy \(x_{t+1} = \by _t\). W przeciwnym przypadku kładziemy \(x_{t+1} = x_t\).
Okazuje się, że punkty \(x_t\) określone powyższym algorytmem zmierzają do zbioru \(A^\star \) z prawdopodobieństwem 1, to znaczy \(dist(x_t,A^\star ) \str 0\), gdy \(t \str \infty \). Bardziej formalnie formułujemy to tak.
Dowód.
Przypominamy drugą część lematu 10.17.
Lemat Borela-Cantellego Niech \((\Omega ,\Sigma ,P)\) będzie przestrzenią probabilistyczną.
Niech \(C_1,C_2,C_3,\dots \in \Sigma \) będzie ciągiem zdarzeń niezależnych:\[\sum _{i=1}^\infty P(C_i) = \infty \ \imp \‚P\left (\bigcap _{t=1}^\infty \bigcup _{i=t}^\infty C_i \right ) = 1. \]
Oznaczmy \(m = \min _A f\). Wtedy \(A^\star = \{x \in A: f(x) = m\}\).
Ciąg \(f(X_t)\) jest nierosnący i ograniczony z dołu przez \(m\), więc jest zbieżny do pewnej zmiennej losowej \(\eta \ge m\).
Niech \(\bY _t\) będą niezależnymi zmiennymi losowymi o rozkładzie jednostajnym na \(A\), których realizacjami są punkty \(\by _i\).
Ustalmy \(\ve > m\).
Ponieważ funkcja \(f\) jest ciągła, zbiór \(B = \{x \in A: f(x) < \ve \}\) jest niepusty i otwarty, więc jego miara Lebesgue’a, \(\nu (B) = \alpha > 0\).
Określmy:
\(C_t = \{\omega \in \Omega : f(\bY _t(\omega )) < \ve \}\) = \(\bY _t^{-1}(B)\), dla \(t = 1,2,3,\dots \).
\(C_t\) są zdarzeniami niezależnymi.
Ponieważ zmienne losowe \(\bY _t\) mają rozkład \(\nu \), więc \(P(C_t) = P_{\bY _t}(B) = \nu (B) = \alpha \) dla \(t \ge 1\). Jest więc spełnione założenie Lematu Borela-Cantellego.
Na podstawie algorytmu PRS zachodzi implikacja:
\[\eta \ge \ve \‚\imp \ \forall t \ge 1\ f(\bY _t) \ge \eta \ge \ve , \]
czyli
\[\{\eta \ge \ve \} \subset \bigcap _{t=1}^\infty \left (\Omega \setminus C_t\right ) =\Omega \setminus \bigcup _{t=1}^\infty C_t.\]
\[\bigcap _{t=1}^\infty \bigcup _{i=t}^\infty C_i \subset \bigcup _{t=1}^\infty C_t \subset \{\eta < \ve \} \]
Z Lematu Borela-Cantellego: \(P(\{\eta < \ve \}) =1\). Ponieważ, \(\ve >m\) było ustalone dowolnie więc \(\eta = m\). Tak więc: \(P(f(X_t) \to m, \hbox { gdy } t \str \infty ) = 1\).
Z ciągłości \(f\) oraz zwartości \(A\), \(P\,(X_t \str A^\star ,\hbox { gdy } t \str \infty ) = 1\) . \(\Box \)
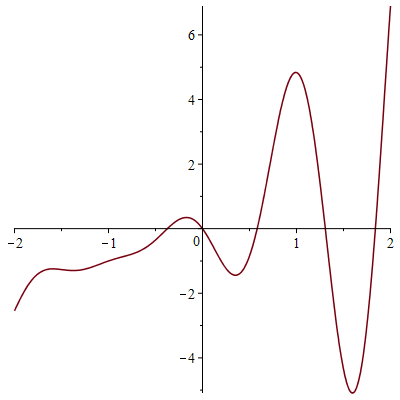
Przykład – 12.19 Szukamy minimum i maksimum globalnego funkcji \(f(x) = x-(x+1)^2\sin (5x) \) na przedziale \(A = [-2,2]\).
Stosując metodę PRS i wykonując 1000 kroków otrzymujemy:
\(a_{min} = 1.5937765\), \(f(a_{min}) = -5.0895387\).
\(a_{max} = 1.9991702\), \(f(a_{max}) = 6.86129796\).
Rozwiązywanie równań, bądź układów równań, można sprowadzić do problemu poszukiwania minimum globalnego. Rzeczywiście, zamiast szukać rozwiązania układu \(f_i(x) = 0\), \(i =1,...,n\) można szukać minimum globalnego funkcji \(\di F(x) = \sum _{i=1}^nf_i(x)^2\).
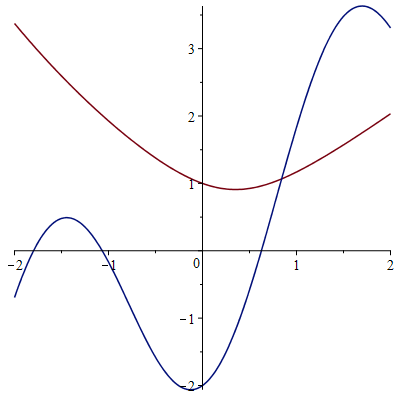
Przykład – 12.20 Znajdziemy przybliżenie rozwiązania równania:
\[ \sqrt {x^2+e^{-x}} = x-2 \cos (2x) \]
w przedziale \([0,1]\).
Stosujemy metodę PRS do funkcji \((f(x) - g(x))^2\), gdzie \(f(x)\) oznacza lewą, a \(g(x)\) prawą stronę równania. Po wykonaniu 1000 kroków otrzymamy:
\(x^\star = 0.84191450\), przy czym
\(f(x^\star ) = 1.067569590\),
\(g(x^\star ) = 1.067498775\).